


山東力創展出IFSB實時高速總線多軸運動控制平臺
在2007 FA/PA展覽會上,山東力創帶來了與山東大學數控技術研究中心聯合開發的IFSB實時高速總線多軸運動控制平臺。
IFSB實時高速多軸運動控制平臺及應用總體介紹
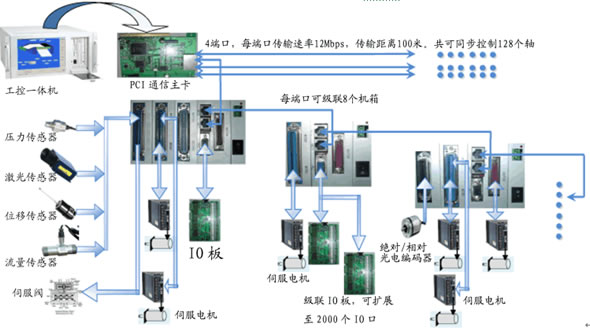
IFSB (Industrial Field Serial Bus)是一種適合于實時高速多軸同步運動控制的網絡總線。在基于標準PC的運動控制器與標準伺服驅動器(模擬或脈沖控制信號可配置)、步進電機驅動器、變頻器、數字I/O、模擬I/O、絕對編碼器以及用戶自己制造的符合IFSB接口的各種設備之間提供一個端口12Mbps的傳輸速率的同步實時連接(系統有四個端口,可提供高達48Mbps傳輸速率的高速同步實時總線),可支持最多達128軸的實時同步運動控制,接口機箱可方便級連,擴展方便,機箱的級連線長可達100米;所有信息以數字形式在控制器與設備之間傳輸,支持系統復雜模型的集中控制;硬件實時同步使得通訊周期的最大抖動小于500ns,可滿足高速高精度的控制要求。操作系統支持WINDOWS2000/XP,XP Embedded以及Linux,在無實時操作系統支持下,系統的更新周期可達500us,有實時操作系統支持時,系統的最小更新周期可達200us(3軸)。用戶可采用C/C ,VB,Delphi,C#通過調用用戶動態鏈接庫(DLL)或ActiveX進行編程,為不同行業應用領域提供一個通用運動控制平臺,滿足當前企業對控制器二次開發的迫切要求。不同的企業可以根據其自身的特點,在此平臺上將自己的專有知識結合進控制系統,開發出專有的運動控制器,形成有自己特色的產品。擺脫傳統運動控制器的束縛和依賴,形成具有企業自主知識產權的控制器,提升企業產品的核心競爭力。這種技術大大縮短了控制器的設計、安裝、調試和維護的時間,降低了產品設計、制造和服務的成本,加速產品的上市時間。
IFSB實時高速多軸運動控制平臺系統框架

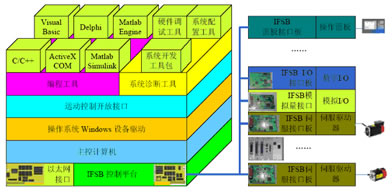
該平臺完全基于標準PC,在主機端可插接PCI,ISA或PC104或PC104Plus總線的IFSB主通訊卡,通過總線與系統要求的各種接口卡簡單級連交互各種信號,由計算機完成各種復雜的算法控制。目前IFSB接口還未與伺服電機驅動器集成在一起,為保證系統能與標準伺服驅動器相連,我們開發了一個帶IFSB總線背板的3U機箱,機箱有多種規格可插一個電源模塊和3-7塊應用接口板(見第四部分的表),各種應用接口卡使得系統能與各類傳感器和執行機構接口,擴展了系統的應用范圍。如果一個機箱滿足不了系統的要求,可以多級級連,機箱最多可級聯8個。
計算機操作系統可采用Windows2000/XP/XPE或Linux操作系統。為保證控制系統的實時性有兩種解決方案:(1)加實時擴展RTX或RTLinux,采用Windows和RTX擴展時操作系統的軟件版權費比較高(一套版權費需5000多元人民幣),而Linux和RTLinux(或RTAI)是免費的; (2)在Windows環境下不加實時擴展,通過Windows內核中段服務程序(ISR)編程可以達到實時性的要求。Windows操作系統環境的開發資源和應用程序豐富,熟悉開發技術的人員多。所以目前我們采用Windows加內核編程的方法來滿足控制的實時性要求。經測試采用這種方法系統可以響應20k頻率的中斷
數控系統平臺支持Windows 2000/NT/XP等。數控應用程序支持集成開發環境象Microsoft Visual Studio 或者Borland C ,Delphi等面向對象工程語言進行開發,同時系統開放內核數據結構。進一步地系統還提供Labview和Mathlab的編程接口。下位機數據通過總線接口以及系統開發工具包對用戶開放。用戶應用系統的開發過程如下:
1.系統硬件系統配置。系統具有硬件自動識別和枚舉功能,系統配置工具能對接入系統的模塊功能進行識別和配置,通過硬件調試工具,分析硬件系統結構,生成硬件系統配置文件。
2. 進行運動控制系統功能定義。根據硬件系統配置信息,定義系統功能。主要包括聯動軸、驅動器控制模式。定義內核數據結構,位置控制模式,數據交換方式等。
3.根據系統硬件結構,采用系統開發包進行控制系統功能定義。采用系統開發工具包分析機械系統動態參數以及動態響應特性,調整系統運動參數。
4.基于Windows組件對象模型,根據給定用戶接口,開發應用程序組件,ActiveX或COM(用戶可以開發自己的譯碼組件、刀具補償組件、插補組件等)。
5.采用用戶熟悉的工程開發工具,在Windows環境下對系統進行功能開發。系統支持用戶自定義控制策略,但這需要支持的系統開發工具。
IFSB實時高速多軸運動控制平臺系統特色優勢
⒈ 采用Windows 設備驅動程序模式,利用運行于內核的Windows設備驅動程序,截獲系統中斷,在ISR中實現實時功能。同時實現系統調度功能。不用實時操作系統可滿足運動控制的實時要求;
⒉ IFSB滿足了開放結構控制器的用戶可以在較大范圍內根據需要選擇和配置硬件,為解決下一代的數字化驅動接口提供了途徑,可以在設備控制層實現分布式控制。
⒊ IFSB采用通用Windows操作系統實現了硬實時控制,為實現控制系統的復雜模型控制、高速、高精度性能奠定了基礎。
⒋ 系統硬件擴展方便,當控制軸數和I/O點數增加時,對數控系統硬件結構沒有影響,便于控制系統的擴充和裁減。




 投訴建議
投訴建議
提交

力創LCR熱量表成功中標“萊鋼御龍灣項目”
山東力創中標“遼寧省機關辦公建筑和大型公共建筑能耗監測平臺建設智能電量監測模塊及其配套部件采購”
山東力創成功進入新疆塔河油田項目建設
千萬項目入主力創
力創中國芯